1:明确有多少个基础排序算法
 </br>
</br>
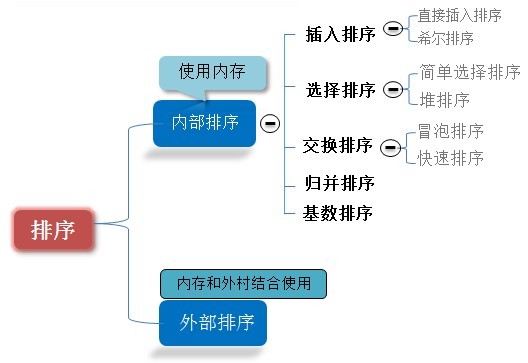
通常我们使用的是内部排序:
a:插入排序—直接插入排序 希尔排序
b:选择排序—简单选择排序 堆排序
c:交换排序—冒泡排序 快速排序
d:归并排序
e:基数排序
那么什么是外部排序呢?为什么要用到外部排序呢?通常数据量太大太大,内存塞不进全部数据的时候采取外部排序。
把排序好的数据和未排序好的数据放到硬盘中储存。
外部排序指的是大文件的排序,即待排序的记录存储在外存储器上,待排序的文件无法一次装入内存,需要在内存和外部存储器之间进行多次数据交换,以达到排序整个文件的目的。
2:下面是我们讲解的排序
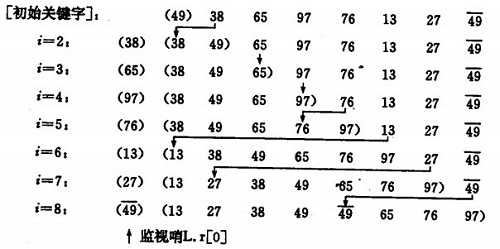
a:直接插入排序
//插入排序
func insertSort(numbers []int) {
i, j := 0, 0
n := len(numbers)
for i = 1; i < n; i++ {
temp := numbers[i] //选取基点
j = i - 1 //i的上一个点
for j >= 0 && temp < numbers[j] { //5 12 17 3 10 7 14 9 11 15 0 19 2 1 13 4 16 6 18 8
//temp = 12 ,i=1;j=0; number[j]=5;temp=12; 就是把大的数据移到后面去
numbers[j+1] = numbers[j] //循环 把 j后面的数字 移到前面去,只要
j--
}
numbers[j+1] = temp
}
fmt.Println(numbers)
}
插入排序(Insertion Sort)的算法描述是一种简单直观的排序算法。它的工作原理是通过构建有序序列,对于未排序数据,在已排序序列中从后向前扫描,找到相应位置并插入。插入排序在实现上,通常采用in-place排序(即只需用到O(1)的额外空间的排序),因而在从后向前扫描过程中,需要反复把已排序元素逐步向后挪位,为最新元素提供插入空间。
步骤:
1:从第一个元素开始,该元素可以认为已经被排序
2:取出下一个元素,在已经排序的元素序列中从后向前扫描
3:如果该元素(已排序)大于新元素,将该元素移到下一位置
3:重复步骤3,直到找到已排序的元素小于或者等于新元素的位置
5:将新元素插入到该位置中
6:重复步骤2
b:希尔排序
//希尔排序
func shellSort(numbers []int) {
n := len(numbers)
var i, j, gap, temp int
gap = n / 2
for gap > 0 {
for i = gap; i < n; i++ {
temp = numbers[i]
j = i - gap
for j >= 0 && temp < numbers[j] {
numbers[j+gap] = numbers[j]
j = j - gap
}
numbers[j+gap] = temp
}
gap = gap / 2
}
fmt.Println(numbers)
}
介绍:
希尔排序,也称递减增量排序算法,是插入排序的一种高速而稳定的改进版本。
希尔排序是基于插入排序的以下两点性质而提出改进方法的:
1、插入排序在对几乎已经排好序的数据操作时, 效率高, 即可以达到线性排序的效率
2、但插入排序一般来说是低效的, 因为插入排序每次只能将数据移动一位
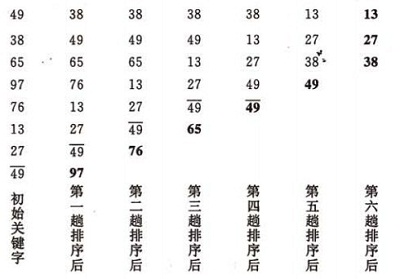
排序效果:

c:简单选择排序
暂时无代码
介绍:
选择排序(Selection sort)是一种简单直观的排序算法。它的工作原理如下。
1:首先在未排序序列中找到最小元素,
2:存放到排序序列的起始位置,
3:然后,再从剩余未排序元素中继续寻找最小元素,
4:然后放到排序序列末尾。以此类推,直到所有元素均排序完毕。
排序效果:

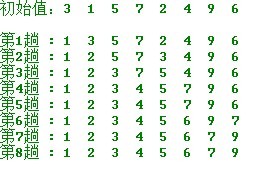
d:冒泡排序
//冒泡排序 交换排序
func defaultsoft(numbers []int) {
fmt.Println(numbers)
temp := numbers[0]
len_number := len(numbers)
for i := 0; i < len_number-1; i++ { //注意数据越界
for j := len_number - 1; j > i; j-- {
if numbers[j] > numbers[i] {
temp = numbers[j]
numbers[j] = numbers[i]
numbers[i] = temp
}
}
}
fmt.Println(numbers)
}
介绍:
冒泡排序(Bubble Sort,台湾译为:泡沫排序或气泡排序)是一种简单的排序算法。它重复地走访过要排序的数列,一次比较两个元素,如果他们的顺序错误就把他们交换过来。走访数列的工作是重复地进行直到没有再需要交换,也就是说该数列已经排序完成。这个算法的名字由来是因为越小的元素会经由交换慢慢“浮”到数列的顶端。
步骤:
1:比较相邻的元素。如果第一个比第二个大,就交换他们两个。
2:对每一对相邻元素作同样的工作,从开始第一对到结尾的最后一对。在这一点,最后的元素应该会是最大的数。
3:针对所有的元素重复以上的步骤,除了最后一个。
4:持续每次对越来越少的元素重复上面的步骤,直到没有任何一对数字需要比较。
排序效果:

e:快速排序
//快速排序 在某一段范围内排序 [s,t]
func quickSort(numbers [] int,s int ,t int){
i:=s
j:=t
fmt.Println(numbers)
var temp int
if s < t{//区间内至少存在俩个元素的情况
temp = numbers[s];//用区间的第一个记录作为基准
fmt.Println("基准",temp)
for i!=j{//从俩端交替向中间扫描,直到i=j为止
for j > i && numbers[j] >temp{//从右向左扫描,找到第一个小于temp的number[j]
j--
}
numbers[i]=numbers[j]//找到这样的number[j],number[j]/number[i]交换
for i <j && numbers[i] <temp{//从左向右扫描,找到第一个大于temp的number[i]
i++
}
numbers[j]=numbers[i]//找到这样的number[i],number[i]/number[j]交换
}
numbers[i]=temp
quickSort(numbers,s,i-1)//对左区间递归排序
quickSort(numbers,i+1,t)//对右区间递归排序
}
}
介绍:
快速排序是由东尼·霍尔所发展的一种排序算法。在平均状况下,排序 n 个项目要Ο(n log n)次比较。在最坏状况下则需要Ο(n2)次比较,但这种状况并不常见。事实上,快速排序通常明显比其他Ο(n log n) 算法更快,因为它的内部循环(inner loop)可以在大部分的架构上很有效率地被实现出来,且在大部分真实世界的数据,可以决定设计的选择,减少所需时间的二次方项之可能性。
步骤:
1:从数列中挑出一个元素,称为 “基准”(pivot)
2:重新排序数列,所有元素比基准值小的摆放在基准前面,所有元素比基准值大的摆在基准的后面(相同的数可以到任一边)。在这个分区退出之后,该基准就处于数列的中间位置。这个称为分区(partition)操作。
3:递归地(recursive)把小于基准值元素的子数列和大于基准值元素的子数列排序。
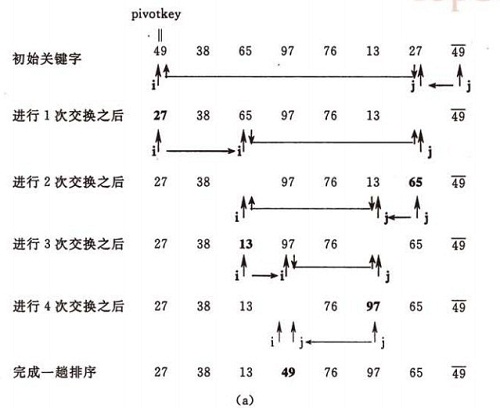
(a):一趟排序的过程:
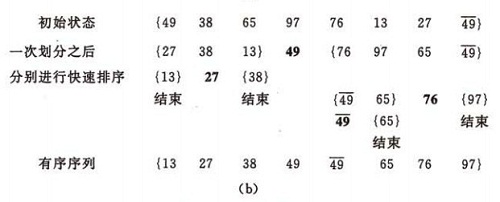
(b):排序的全过程 :
排序效果:

f:堆排序
暂无代码
介绍:
堆积排序(Heapsort)是指利用堆这种数据结构所设计的一种排序算法。堆是一个近似完全二叉树的结构,并同时满足堆性质:即子结点的键值或索引总是小于(或者大于)它的父节点。
最大堆和最小堆问题
排序效果:

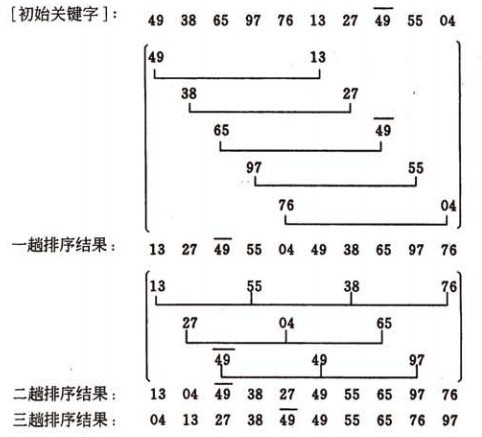
g:归并排序
介绍:
归并排序(Merge sort,台湾译作:合并排序)是建立在归并操作上的一种有效的排序算法。该算法是采用分治法(Divide and Conquer)的一个非常典型的应用
步骤:
1:申请空间,使其大小为两个已经排序序列之和,该空间用来存放合并后的序列
2:设定两个指针,最初位置分别为两个已经排序序列的起始位置
3:比较两个指针所指向的元素,选择相对小的元素放入到合并空间,并移动指针到下一位置
4:重复步骤3直到某一指针达到序列尾
5:将另一序列剩下的所有元素直接复制到合并序列尾
 </br>
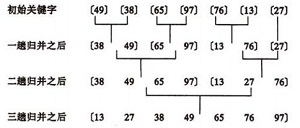
排序效果:
</br>
排序效果:

总结
各种排序的稳定性,时间复杂度和空间复杂度总结:
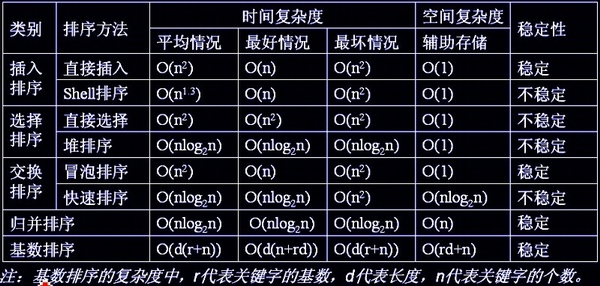
比较时间复杂度函数的情况:

时间复杂度来说:
(1)平方阶(O(n2))排序
各类简单排序:直接插入、直接选择和冒泡排序;
(2)线性对数阶(O(nlog2n))排序
快速排序、堆排序和归并排序;
(3)O(n1+§))排序,§是介于0和1之间的常数。
希尔排序
(4)线性阶(O(n))排序
基数排序,此外还有桶、箱排序。
说明:
当原表有序或基本有序时,直接插入排序和冒泡排序将大大减少比较次数和移动记录的次数,时间复杂度可降至O(n);
而快速排序则相反,当原表基本有序时,将蜕化为冒泡排序,时间复杂度提高为O(n^2);
原表是否有序,对简单选择排序、堆排序、归并排序和基数排序的时间复杂度影响不大。
选择排序算法准则:
每种排序算法都各有优缺点。因此,在实用时需根据不同情况适当选用,甚至可以将多种方法结合起来使用。
选择排序算法的依据
影响排序的因素有很多,平均时间复杂度低的算法并不一定就是最优的。相反,有时平均时间复杂度高的算法可能更适合某些特殊情况。同时,选择算法时还得考虑它的可读性,以利于软件的维护。一般而言,需要考虑的因素有以下四点:
1.待排序的记录数目n的大小;
2.记录本身数据量的大小,也就是记录中除关键字外的其他信息量的大小;
3.关键字的结构及其分布情况;
4.对排序稳定性的要求。
设待排序元素的个数为n.
1)当n较大,则应采用时间复杂度为O(nlog2n)的排序方法:快速排序、堆排序或归并排序序。
快速排序:是目前基于比较的内部排序中被认为是最好的方法,当待排序的关键字是随机分布时,快速排序的平均时间最短;
堆排序 : 如果内存空间允许且要求稳定性的,
归并排序:它有一定数量的数据移动,所以我们可能过与插入排序组合,先获得一定长度的序列,然后再合并,在效率上将有所提高。
2) 当n较大,内存空间允许,且要求稳定性 =》归并排序
3)当n较小,可采用直接插入或直接选择排序。
直接插入排序:当元素分布有序,直接插入排序将大大减少比较次数和移动记录的次数。
直接选择排序 :元素分布有序,如果不要求稳定性,选择直接选择排序
5)一般不使用或不直接使用传统的冒泡排序。
6)基数排序
它是一种稳定的排序算法,但有一定的局限性:
1、关键字可分解。
2、记录的关键字位数较少,如果密集更好
3、如果是数字时,最好是无符号的,否则将增加相应的映射复杂度,可先将其正负分开排序。
7)end
